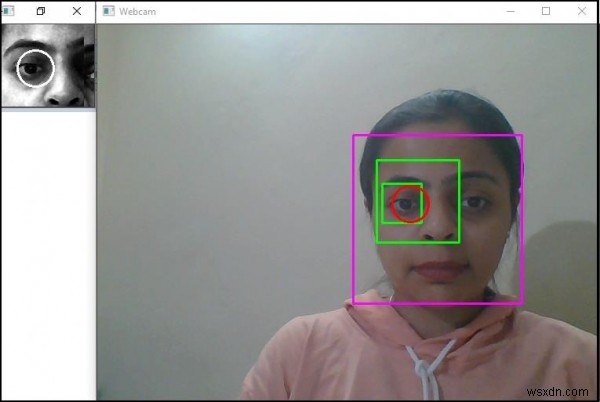
Ở đây, chúng ta sẽ tìm hiểu cách phát hiện và theo dõi chuyển động của nhãn cầu trong OpenCV.
Chương trình sau đây trình diễn để phát hiện nhãn cầu và theo dõi vị trí.
Ví dụ
#include<iostream>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/objdetect/objdetect.hpp>
#include<string>
using namespace cv;
using namespace std;
Vec3f eyeBallDetection(Mat& eye, vector<Vec3f>& circles) {
vector<int>sums(circles.size(), 0);
for (int y = 0; y < eye.rows; y++) {
uchar* data = eye.ptr<uchar>(y);
for (int x = 0; x < eye.cols; x++) {
int pixel_value = static_cast<int>(*data);
for (int i = 0; i < circles.size(); i++) {
Point center((int)round(circles[i][0]), (int)round(circles[i][1]));
int radius = (int)round(circles[i][2]);
if (pow(x - center.x, 2) + pow(y - center.y, 2) < pow(radius, 2)) {
sums[i] = sums[i] + pixel_value;
}
}
++data;
}
}
int smallestSum = 9999999;
int smallestSumIndex = -1;
for (int i = 0; i < circles.size(); i++) {
if (sums[i] < smallestSum) {
smallestSum = sums[i];
smallestSumIndex = i;
}
}
return circles[smallestSumIndex];
}
Rect detectLeftEye(vector& eyes) {
int leftEye = 99999999;
int index;
for (int i = 0; i < eyes.size(); i++) {
if (eyes[i].tl().x < leftEye) {
leftEye = eyes[i].tl().x;
index = i;
}
}
return eyes[index];
}
vector<Point>centers;
Point track_Eyeball;
Point makeStable(vector<Point>& points, int iteration) {
float sum_of_X = 0;
float sum_of_Y = 0;
int count = 0;
int j = max(0, (int)(points.size() - iteration));
int number_of_points = points.size();
for (j; j < number_of_points; j++) {
sum_of_X = sum_of_X + points[j].x;
sum_of_Y = sum_of_Y + points[j].y;
++count;
}
if (count > 0) {
sum_of_X /= count;
sum_of_Y /= count;
}
return Point(sum_of_X, sum_of_Y);
}
void eyeDetection(Mat& frame, CascadeClassifier& faceCascade, CascadeClassifier& eyeCascade) {
Mat grayImage;
cvtColor(frame, grayImage, COLOR_BGR2GRAY);
equalizeHist(grayImage, grayImage);
//Detecting the face//
Mat inputImage = grayImage;
vector<Rect>storedFaces;
float scaleFactor = 1.1;
int minimumNeighbour = 2;
Size minImageSize = Size(150, 150);
faceCascade.detectMultiScale(
inputImage, storedFaces, scaleFactor, minimumNeighbour, 0 | CASCADE_SCALE_IMAGE, minImageSize);
if (storedFaces.size() == 0)return;
Mat face = grayImage(storedFaces[0]);
//Drawing rectangle around the detected face//
int x = storedFaces[0].x;
int y = storedFaces[0].y;
int h = y + storedFaces[0].height;
int w = x + storedFaces[0].width;
rectangle(frame, Point(x, y), Point(w, h), Scalar(255, 0, 255), 2, 8, 0);
//Detecting the eyes//
Mat faceRegion = face;
vector<Rect>eyes;
float eyeScaleFactor = 1.1;
int eyeMinimumNeighbour = 2;
Size eyeMinImageSize = Size(30, 30);
eyeCascade.detectMultiScale(faceRegion, eyes, eyeScaleFactor, eyeMinimumNeighbour, 0 | CASCADE_SCALE_IMAGE, eyeMinImageSize);
if (eyes.size() != 2)return;
//Drawing the rectangle around the eyes//
for (Rect& eye : eyes) {
rectangle(frame, storedFaces[0].tl() + eye.tl(), storedFaces[0].tl() + eye.br(), Scalar(0, 255, 0), 2);
}
//Getting the left eye//
Rect eyeRect = detectLeftEye(eyes);
Mat eye = face(eyeRect);
equalizeHist(eye, eye);
//Applying Hough Circles to detect the circles in eye region//
Mat hough_Circle_Input = eye;
vector<Vec3f>circles;
int method = 3;
int detect_Pixel = 1;
int minimum_Distance = eye.cols / 8;
int threshold = 250;
int minimum_Area = 15;
int minimum_Radius = eye.rows / 8;
int maximum_Radius = eye.rows / 3;
HoughCircles(hough_Circle_Input, circles,
HOUGH_GRADIENT, detect_Pixel, minimum_Distance, threshold, minimum_Area, minimum_Radius, maximum_Radius);
//Detecting the drawing circle that encloses the eyeball//
if (circles.size() > 0) {
Vec3f eyeball = eyeBallDetection(eye, circles);
Point center(eyeball[0], eyeball[1]);
centers.push_back(center);
center = makeStable(centers, 5);
track_Eyeball = center;
int radius = (int)eyeball[2];
circle(frame, storedFaces[0].tl() + eyeRect.tl() + center, radius, Scalar(0, 0, 255), 2);
circle(eye, center, radius, Scalar(255, 255, 255), 2);
}
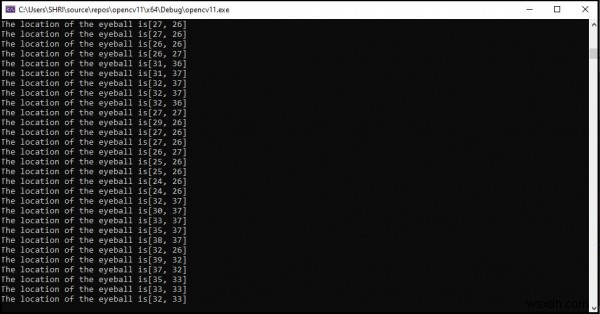
cout << "The location of the eyeball is" << track_Eyeball << endl;
imshow("Eye", eye);
}
int main() {
//loading the cascade classifier//
CascadeClassifier faceCascade;
faceCascade.load("C:/opencv/sources/data/haarcascades/haarcascade_frontalface_alt.xml");
CascadeClassifier eyeCascade;
eyeCascade.load("C:/opencv/sources/data/haarcascades/haarcascade_eye.xml");
//Capturing camera feed and calling eyeDetection function//
VideoCapture cap(0);
Mat frame;
while (1) {
cap >> frame;
eyeDetection(frame, faceCascade, eyeCascade);
imshow("Webcam", frame);
if (waitKey(30) >= 0) break;
}
return 0;
} Đầu ra